TAMP Block Stacking Simulation
A Task and Motion Planning (TAMP) system for robotic block manipulation using a Franka Panda robot in Genesis simulation.
📅 Date
…
🌐 Link
N/A
🏷️ Tags
Task and Motion Planning (TAMP) combines high-level symbolic reasoning with low-level motion planning to enable robotic manipulation. Symbolic task planners generate abstract action sequences but do not account for physical constraints, such as collisions or reachability. Motion planners handle geometry and collision checking but cannot reason about task-level objectives. TAMP integrates both components to achieve practical robotic manipulation.
In this project, we implemented a TAMP system for block stacking using the Genesis simulator with a Franka Panda robot and OMPL. Our pipeline consists of five main components: a symbolic abstraction module that converts block positions into PDDL predicates, Pyperplan for generating action sequences using the Blocksworld domain, motion primitives executed through OMPL’s RRT-Connect planner, an execution loop that integrates all components and re-plans when actions fail, and a spatial augmentation system to provide spatial information on top of the symbolic action plan.
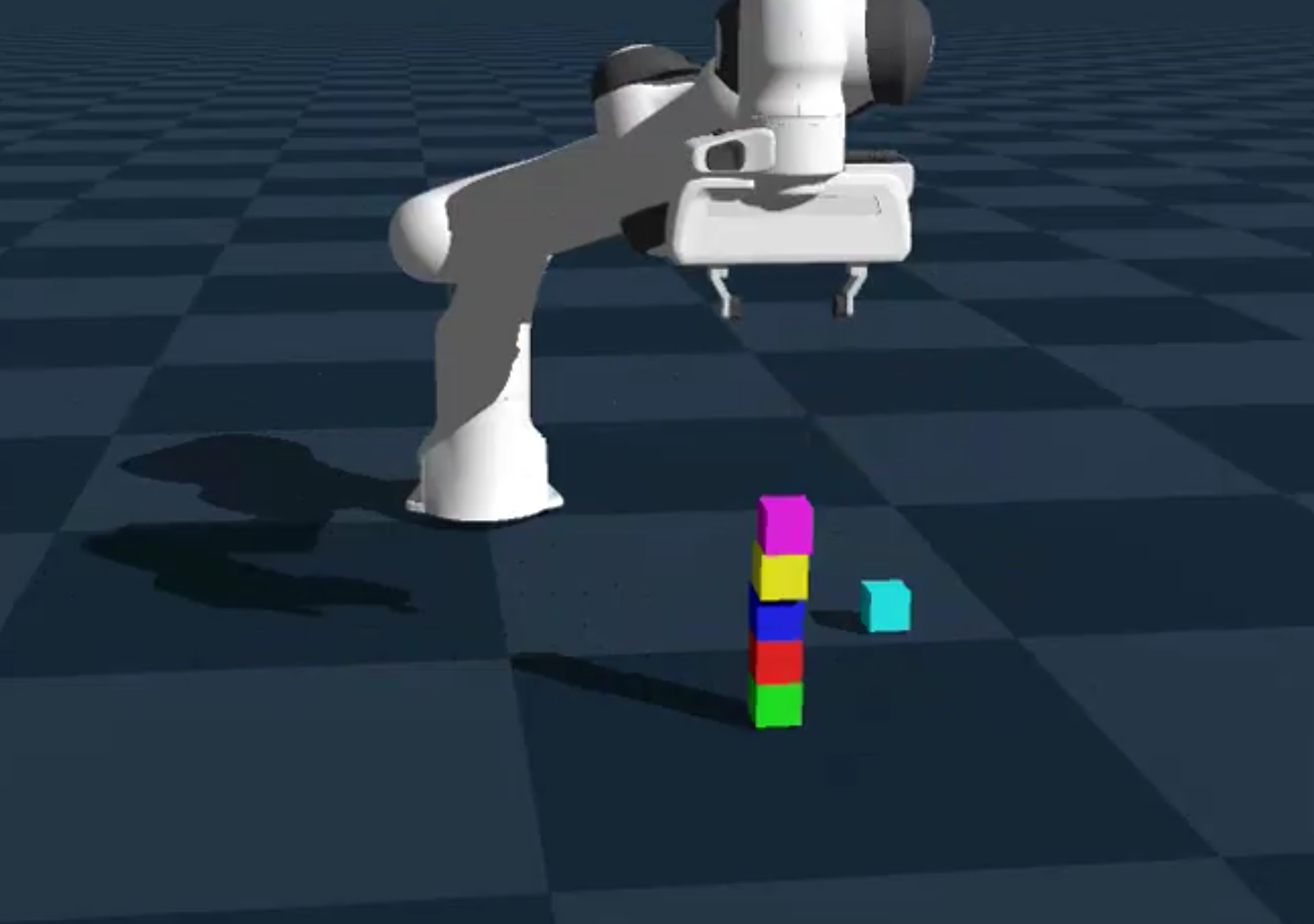
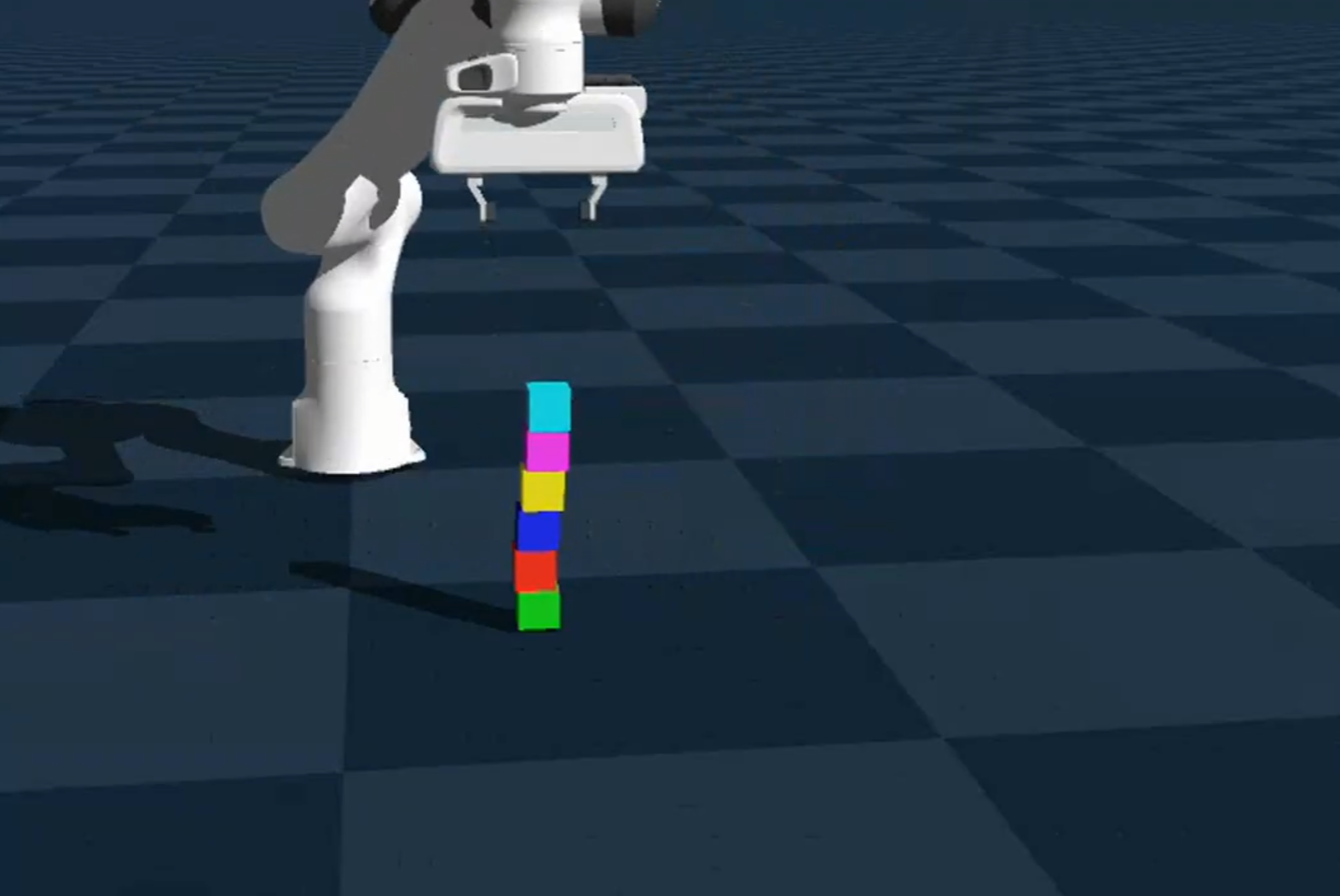
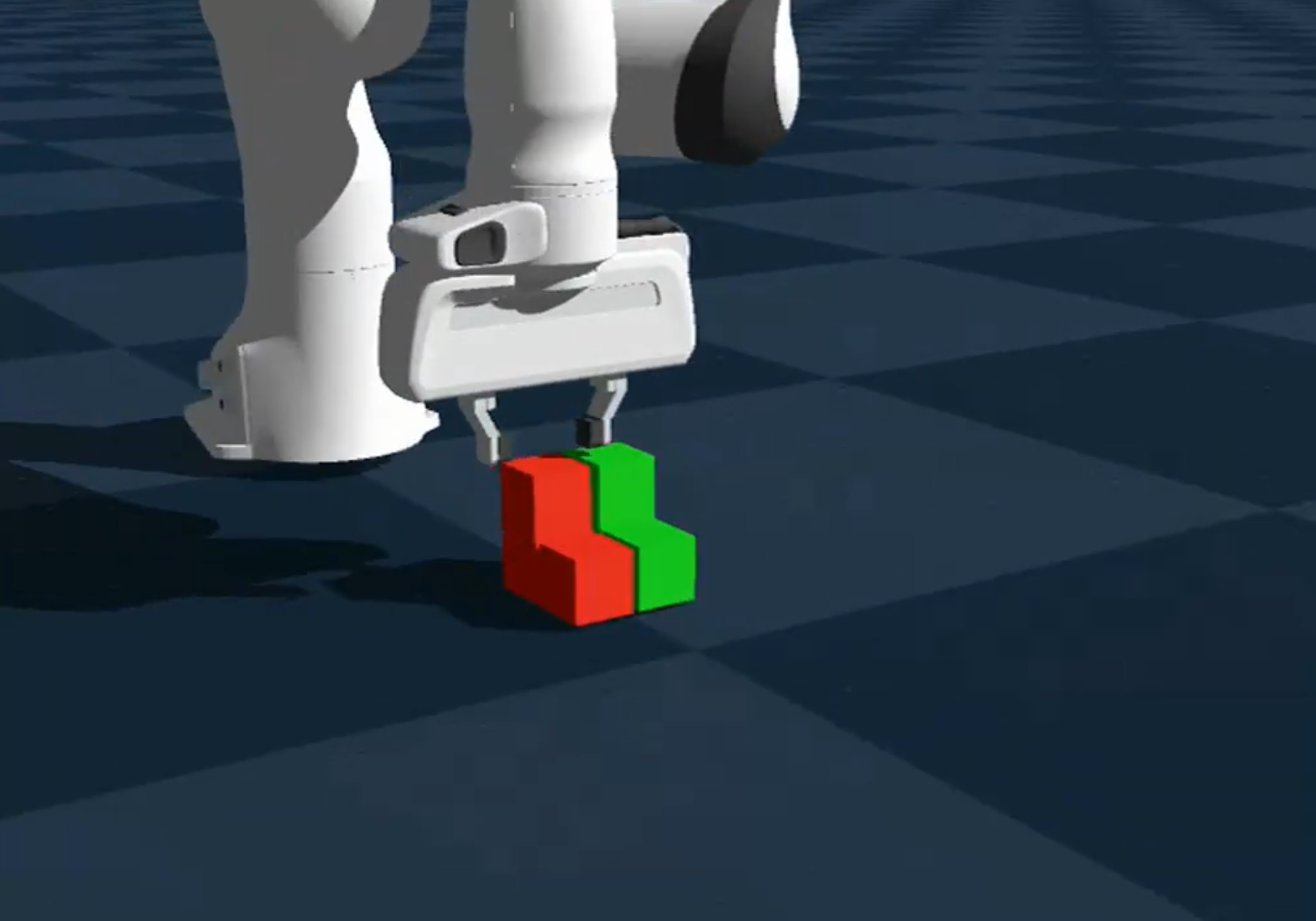
The system addresses four progressively challenging tasks: building two three-block towers (Goal 1), constructing single towers of five and six blocks (Goals 2-3), and creating spatially-constrained grid configurations (Goals 4A/4B). Goal 4 introduces geometric constraints inexpressible in PDDL, requiring a spatial augmentation layer that bridges symbolic and continuous planning.
Project Gallery